■それでは、まず自律移動型ロボットについての概要や開発事例などお聞かせください
大西 : 自律移動型ロボットについては、ソフトウエア開発の技術をコアに、電気もメカも試作レベルであれば対応しています。自律移動型ロボットは、“ソフト”、“電気”、“メカ”の3つの要素技術がないとつくれないもので、大抵の会社はどれか1つの技術に特化しているケースが多いと思いますが、当社ではソフトウエアの技術力を強みとし、3つを平均的にできるようなスタイルで行っています。
最初は、ソフトウエアを中心に行っていましたが、都内のキラキラしたロボットベンチャーと競合するとどうしても勝ち目がないので、そういったことを回避するために3つの要素技術で展開しています。
また、どうして3つの要素技術に対応できるのかというと、当社のエンジニアは「ロボコン」経験者を多く採用していることが、大きな要因になっています。「ロボコン」は、NHKを始め日本中に色々な大会があり、基本的に“ソフト”、“電気”、“メカ”の3つでチーム分けを行ってロボットを開発していきます。ただ、チーム内で誰かがいなくなったり、誰かの開発が遅れていたりなどのトラブルが発生するので、「ロボコン」では途中からこの3つの垣根をあまり意識せずに開発が進められるケースがよくあります。
そのため、大人から見れば全然違うと思われますが、最近の若い世代はこの3つの要素技術を合わせてロボット技術と認識しているようです。そういったことから「ロボコン」経験者のエンジニアは、ほとんどこの3つの要素技術に対応することができるため、それを活かした研究開発を行っています。
それから市場展開については、大手企業が参入しないようなニッチな市場に目を向けてチャレンジしています。その中で、当社の経営方針や社名の由来にもなっている「人生も仕事も、思い通りにいかないのが当たり前。明るく前向きにクフウして、困難を涼しい顔して乗り越えよう。」をモチーフに、まだ世の中に存在しないような自律移動型サービスロボットの開発を目指しています。
現状も色々と開発を進めていますが、すでに自社製品として製品化したのは業務用ドライ掃除ロボット『Asion』になります(写真1)。概要としては、自律移動型ロボットに掃除ユニットを搭載した製品で、自律移動型ロボットには、ROS/AI/SLAM(2次元&3次元&Visual SLAM)/LiDARなどの技術が採用されています。

写真1 業務用ドライ掃除ロボット『Asion』
私たちがこの掃除ロボットを手掛け始めた頃は、他に競合する会社はいなかったようですが、最近は色々と競合する会社が存在するようになってきました。また、掃除ロボットにも色々と種類がありますが、最近では壁や人などに衝突しないような製品が注目されています。
ごみというのは、風や人の流れなどで壁際に溜まりますが、壁際に寄るほど自律移動は難しくなります。これは人間も同じで、視界の広いところで歩くのと視界が狭いところで歩くのでは、歩き方も大きく変わってきます。この市場に参入している大手企業は、壁際に10cmまたは5cm寄るなど競争されています。
当社も以前は、そのように壁際に寄る開発を行っていましたが、実際に使われる現場の声を聞いてみると、大手企業でも壁際に寄るのは非常に苦労されていたり、「壁際は人間がやればよくてロボットはできるところだけをやってくれればいい」という意見が非常に多くありました。そのため、当社は思い切って壁際に寄る開発をやめ、その代わりに他の部分に力を入れた結果、当社でもなんとかこの土俵に乗れている状況です。
ただ、それだけでは売れていかないので、他社との差別化を図るため、吸引力の強さに力を入れています。他社は、どちらかというと静かで、軽くて、バッテリーが長持ちなどにポイントを置き開発されますが、その場合どうしても効率を考えた吸引力になってしまいます。当社では、大きくて、重くて、うるさくてもいいから、とにかく吸引力が強いにポイントを置き開発しています。それにより、他社の製品では困難であった凹凸や段差などの乗り越えも、当社の製品は吸引力の強さによりクリアできることが大きな強みになっています。
また基本的には、会社として収益の向上を目指さなくてはいけませんが、それだけに捕らわれず社内ですごくワクワクするような開発も進められる会社を目指したいと思っており、お金のためだけじゃないプロジェクトを必ず1つテーマを掲げて行っています。この『Asion』も、実はそのテーマを掲げて開発した製品で、すでに販売も行っています。
そして次のテーマとしては、『階段昇降ロボット』の開発を進めています(写真2)。こちらは、『Asion』のノウハウを発展させて開発を行っており、「階段の昇降」といったニッチなニーズにスポットを当て、もし製品化までいけたらニーズがそれほどない分、世界初になるのではと期待しています。それでも、年間ある程度の需要は見込んでおり、我々にマッチする市場だと思っています。

写真2 『階段昇降ロボット』
最初のアプリケーションとしては、階段の掃除からスタートしていますが、経済産業省や福島県などからもご支援をいただきながら開発を進める中で、それ以外にも階段のチェックや検査など色々とニーズがあることが分かってきました。そのため、『階段掃除ロボット』ではなく『階段昇降ロボット』で開発を進め、我々だけでは対応できない部分をいくつかの大学に協力していただき、産学連携という形で行っています。
また最近では、AIについても必要に応じて研究を進めており、ディープラーニングによる物体認識(yolo)や、機会学習(OpenAI Gym)による最適経路生成などの研究開発を行っています。
■次に、協働ロボットの概要や開発事例などお聞かせください
大西 : どちらかというと当社の自律移動型ロボットは、それほど収益が上がらず、ワクワクするような開発の方に位置付けされていますが、それでは会社として成り立っていかないため、協働ロボットで収益を上げています。
現状では、世界的にも有名なUniversalRobot社の協働ロボットを使用し、TIG溶接というニッチな溶接方法に対応した『TIG溶接システム』の開発を当社で行っています(写真3)。この製品は、機械商社にOEM供給し、その機械商社を通じて販売を行っています。プログラムの知識は不要で、タングステンの先端を始点と終点に合わせてトーチの姿勢を決めたら、専用アプリの画面をタップ操作するだけの簡単操作を実現しています。
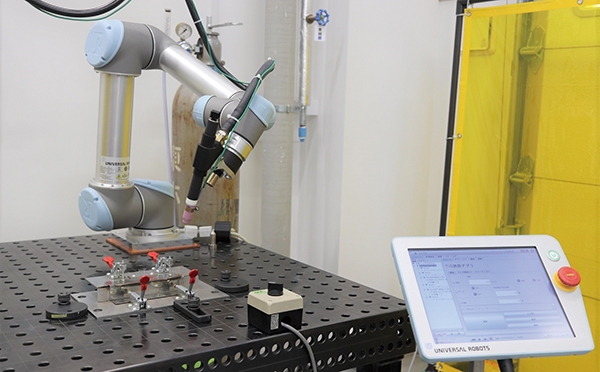
写真3 『TIG溶接システム』
また、同じくUniversalRobot社製協働ロボットのシステムインテグレーションも行っています。中小製造業企業向けの導入支援などがメインで、UniversalRobotの日本支社とは色々と一緒にビジネスを行っており、先日はUniversalRobotの公式HPで当社の事例を紹介していただきました。
このように協働ロボットのビジネスは、当社の収益を担う役割になっていますが、最近では『Asion』のノウハウを活かした自律移動型ロボットの受託開発もスタートさせています。おかげさまで色々な案件をいただいており、徐々に協働ロボットからこちらが収益の柱になってきています。
最近の事例としては、日本科学未来館のプロジェクトとして進められていた『AIスーツケース』の受託開発になります。このプロジェクトは、現在大手企業から出向で日本科学未来館の館長職に就いている全盲の女性の方から発信され、国家プロジェクトにもなっており、全盲の方がスーツケースを持っていれば盲導犬のように誘導してくれるロボットの開発です。すでに3台の受注をいただいており、今年3月末の納品に向け最後の調整を進めています。
- 会社名
- 株式会社 クフウシヤ
- 所在地
- 相模原市緑区



-
真空リフロー、N2リフロー、エアリフローのことなら、エイテックテクトロン(株)にお任せください。フラックスレス真空リフロー装置販売開始!エイテックテクトロン株式会社
-
独自の加工技術とノウハウで様々な材料にチャレンジ 〜色々なアイデアを生み出して研究者をサポート〜 ムソー工業株式会社 代表取締役 尾針 徹治 氏Gichoビジネスコミュニケーションズ株式会社
-
話題のGlass PKG実装技術の動向 〜先端電子部品への応用と 最新のCuダイレクトめっきGWCについて〜 Grand Joint Technology Ltd 大西 哲也(T. Onishi)Gichoビジネスコミュニケーションズ株式会社