■では、独自のビジョンシステムによるロボット事業の概要や、ビジョンシステムの特徴などについてお聞かせください
大野 : ビジョンシステムは多くの企業が製品展開を行っていますが、我々はそのような汎用ビジョンシステムを展開されている企業と競合するつもりはなく、例えばエンドユーザーのビジョンへの要求が精度も不要で限定的であるといったニーズに対し、汎用品ではオーバースペックとなる場合において、当社のビジョンシステムを提案するといった形を取っています。
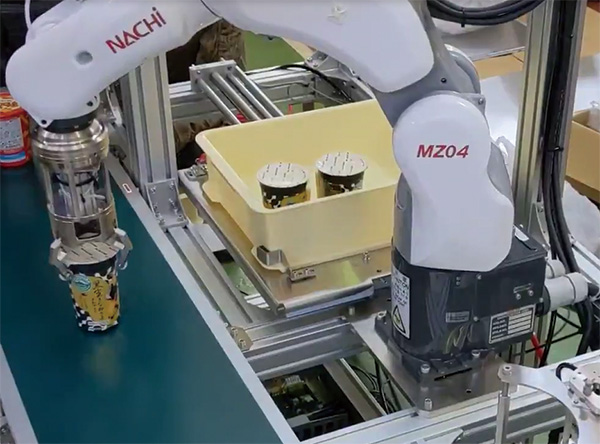
ビジョンシステムといっても当社の場合は、市販のUSBカメラなどを使ってPCで画像処理ができてしまうもので、そこから座標などを取得してロボット制御を行う簡易なシステムになります。1つの例を挙げると、2019年の「国際ロボット展」に出展した時に展示したデモ機では、コンベヤで流れて来る製品を自動で位置や向きを認識し、取りにいくデモンストレーションを行いました(写真2)。

写真2 2019年の「国際ロボット展」に出展した時の様子
そのデモでは、取った製品をあらかじめ用意した箱の中に置いていくのですが、箱の中のスペースをシステムで認識し、空きスペースの中で一番効率のよい場所に置いていきます。また、製品を取りにいくハンドについても、事前に登録したものの中から画像認識し、自動で最適なものに交換して取りにいくツールチェンジャ機構を自社で開発しました。このデモ機に搭載したカメラは、コンシューマ向けのゲーム機などで使用するもので、通販サイトで購入できるような安価なものを採用しています。
安価とはいってもこのカメラは、デプス情報という3D的な距離情報も取得できるのが特徴となっており、例えば、同じ製品がいくつか重なっていた場合、通常の2Dカメラでは平面的にしか見えないので位置情報しか分かりませんが、このデプス情報からカメラとワークとの距離情報が得られるので、例えば重なりあっている商品でも高さを認識し、適正な位置に取りにいくということが可能になっています。
このように、高価な3Dカメラシステムを使わず、デプス情報が取得できる安価なコンシューマ向けのカメラを採用したロボット制御の技術で、よりお客様にメリットのあるシステムの提供が可能になります。また、このデモ機で使用した自社開発のツールチェンジャですが、市販のものと遜色のない速度/精度でハンド交換できるうえ、商品ケースへの干渉を抑える形状とすることで積載率の向上にも寄与しており、この辺りは自社で開発/設計できることの強みだと思います。
さらに、前述のとおりワークを搬送するためのロボットアームも自社で開発するケースがあります。例えば、一般的に部品搬送などに使われる水平多関節(スカラ)ロボットがありますが、そのアームを通常より1軸増やした特殊形状のスカラロボットなどです。
一般的なスカラロボットでは、前腕と後腕の2つの腕でX/Y座標を決めていきますが、例えば非常に狭い領域の中で姿勢をとりつつ1個所だけ奥の方まで入っていかなくてはならないようなケースでは、市販のスカラロボットではほぼ対応できないのですが、それを可能にする特殊構造のロボットアームを自社で製作できれば、エンドユーザーにとって最適のソリューションを提案できることになります。通常、こういったケースではアームの姿勢制御が難しくなるのですが、その制御プログラムについても自社開発を行っています。
もちろんこのような特殊アームは開発コストもかかるため、すべての案件で自社開発のロボットアームを使うということではなく、一般的な産業用ロボットで対応できるものは、そちらを優先して選定していきます。エンドユーザーの環境/要求/条件などは本当に様々なので、それらの課題を確実にクリアし、ベストと言えるシステムを提案するためには、ただ単に市販のデバイスを組み合わせるだけのインテグレーションではなく、このような自社の高い技術力と組み合わせることが非常に有意義であり、これまでもそういう視点で自社技術の向上に努めてきましたし、それがまさに我々のセールスポイントになっていると思います。
これが、独自ビジョンシステムを始めとする我々の技術力を活かしたシステムの事例であり、この他にも様々な自動搬送システムの実績があります(写真3)。
<パッケージ品搬送>
独自の低コスト画像認識と専用設計のツールチェンジャで多品種の商品搬送に対応
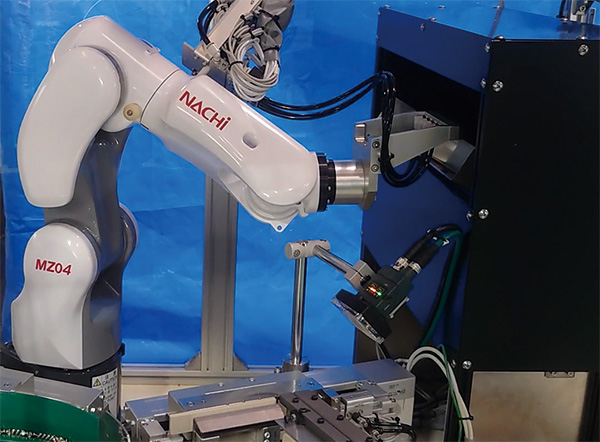
<自動組立検査装置>
専用設計のハンドにより複数個同時作業を行い高速タクトを実現

<ロード・アンロード>
協働ロボットにより自動作業と人手作業を柔軟に切り分けられるロード・アンロードシステム
- 会社名
- 株式会社 トランセンド
- 所在地
- 相模原市緑区



-
真空リフロー、N2リフロー、エアリフローのことなら、エイテックテクトロン(株)にお任せください。フラックスレス真空リフロー装置販売開始!エイテックテクトロン株式会社
-
独自の加工技術とノウハウで様々な材料にチャレンジ 〜色々なアイデアを生み出して研究者をサポート〜 ムソー工業株式会社 代表取締役 尾針 徹治 氏Gichoビジネスコミュニケーションズ株式会社
-
話題のGlass PKG実装技術の動向 〜先端電子部品への応用と 最新のCuダイレクトめっきGWCについて〜 Grand Joint Technology Ltd 大西 哲也(T. Onishi)Gichoビジネスコミュニケーションズ株式会社